
AgentFly:重塑Agent,无需微调LLM,如我们一样的记忆和经验持续学习
未来,AgentFly的研究方向可能包括:更高效的记忆压缩与检索机制、遗忘策略以应对记忆爆炸、以及在更开放的多智能体环境中的协作与应用。近年来,大型语言模型(LLM)智能体已成为AI领域的热点,它们能自主使用工具、进行多步推理,完成复杂任务,如深度研究、代码生成、多轮对话等。,智能体通过不断积累成功和失败的经验(存入“案例库”),在遇到新任务时快速检索相似案例指导决策,从而实现持续进步——:它告诉
近年来,大型语言模型(LLM)智能体已成为AI领域的热点,它们能自主使用工具、进行多步推理,完成复杂任务,如深度研究、代码生成、多轮对话等。然而,现有的LLM智能体面临两大困境:一是依赖静态、手工设计的工作流程,缺乏灵活性,无法适应新环境;二是通过微调LLM参数来实现适应,虽然灵活但成本极高,且容易发生“灾难性遗忘”,不适合持续学习。
这就引出了一个核心问题:能否让LLM智能体像人类一样,通过记忆和经验持续学习,而不必每次都重新训练或微调模型?
-
论文:AgentFly: Fine-tuning LLM Agents without Fine-tuning LLMs
-
链接:https://arxiv.org/pdf/2508.16153
本论文正是针对这一挑战提出的创新解决方案。作者受人类记忆机制启发,提出了一个基于记忆的在线强化学习框架,智能体通过不断积累成功和失败的经验(存入“案例库”),在遇到新任务时快速检索相似案例指导决策,从而实现持续进步——整个过程完全不更新LLM的权重。
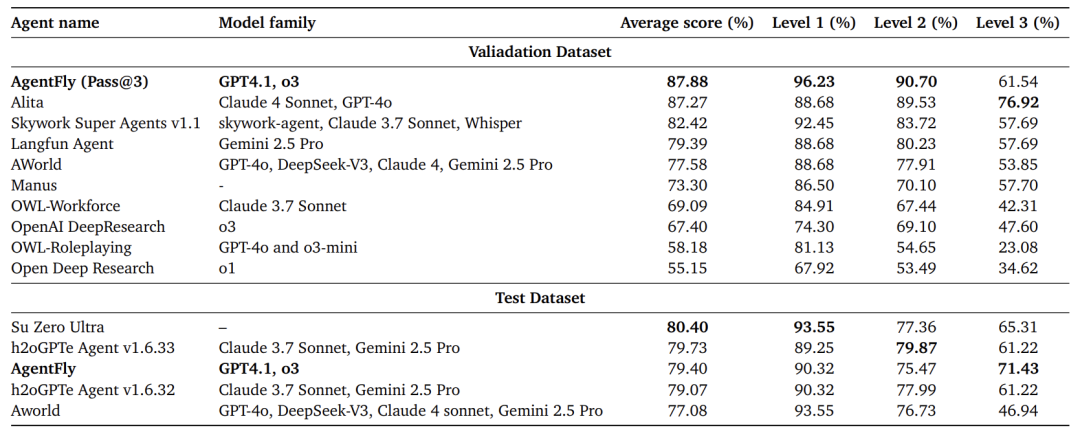
AgentFly在多个权威基准测试中表现卓越,如在GAIA验证集上达到87.88%的准确率(排名第一),在DeepResearcher上显著超越已有训练型方法,证明了其高效性和泛化能力。这不仅为构建低成本、高自适应的通用智能体提供了新范式,也推动了AI向更接近人类学习方式的方向发展。
下面,我们将深入解读AgentFly的核心方法、实现细节、实验结果及其深远意义。
核心方法:基于记忆的MDP与案例推理(CBR)
形式化框架:记忆增强的MDP(M-MDP)
传统强化学习使用马尔可夫决策过程(MDP)建模智能体与环境的交互,包括状态、动作、转移概率、奖励函数等。AgentFly在此基础上引入外部记忆空间,形成记忆增强的MDP(Memory-augmented MDP, M-MDP),其定义为:
其中:
-
:状态空间(当前任务或环境状态)
-
:动作空间(智能体可执行的操作)
-
:状态转移函数
-
:奖励函数
-
:折扣因子
-
:记忆空间,存储历史经历(案例)
记忆空间 是AgentFly的核心创新。每个案例 是一个三元组 ,分别表示过去某次任务的状态、执行的动作和获得的奖励。智能体通过不断积累这些案例,形成一个不断增长的“经验库”。
CBR智能体的决策机制
AgentFly的决策过程模仿人类的案例推理(Case-Based Reasoning, CBR)过程,分为四步:
-
检索(Retrieve):根据当前状态 ,从案例库 中检索出最相关的案例 。
-
重用与修订(Reuse & Revise):基于检索到的案例 ,LLM生成当前动作 。
-
评估(Evaluate):执行动作 ,获得奖励 和下一个状态 。
-
保留(Retain):将本次经历 存入案例库,更新记忆。
整个轨迹的概率可表示为:
优化目标:最大熵强化学习与软Q学习
为了优化案例检索策略 ,作者采用最大熵强化学习,在最大化累积奖励的同时鼓励策略多样性,避免陷入局部最优。其目标函数为:
其中 是熵, 是温度超参,控制探索与利用的平衡。
在该框架下,软Q函数 表示在状态 和记忆 下选择案例 的期望回报,其贝尔曼方程为:
其中 是软价值函数。最优检索策略 具有闭式解:
该公式是核心中的核心:它告诉我们,检索案例的概率由它们的Q值决定——Q值越高的案例(即过去越成功的案例),被选中的概率越大。温度参数 控制着探索程度: 越大,策略越随机; 越小,越倾向于选择Q值最高的案例。
两种记忆机制实现
AgentFly提供了两种实现检索策略 的方式:
-
非参数化记忆:直接使用向量检索(如余弦相似度)从案例库中找最相似的案例。简单高效,但缺乏适应性。
-
参数化记忆:训练一个神经网络Q函数 来评估案例价值,并通过梯度下降更新(见公式15和26)。更灵活,能学习到任务之间的潜在规律。
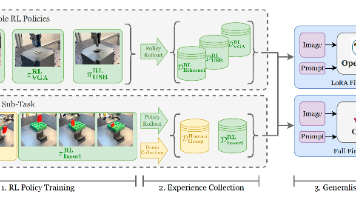
实现:AgentFly深度研究智能体
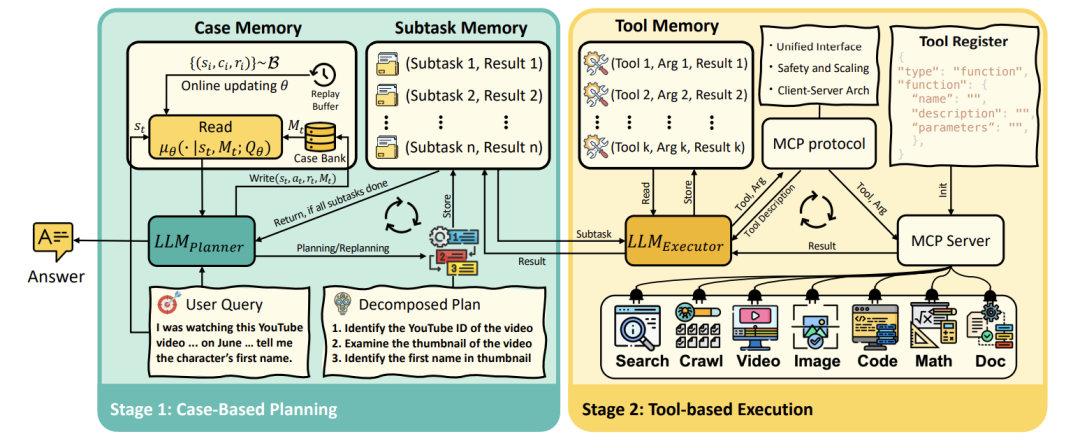
AgentFly被实例化为一个规划器-执行器(Planner-Executor)架构,如上图所示,两者交替工作,共同完成任务。
双阶段协作流程
-
规划器(Planner):由强大LLM(如GPT-4.1)驱动,是一个CBR智能体。它接收用户任务,从案例记忆中检索K个相关案例,据此制定计划(分解为子任务),并写入子任务记忆。
-
执行器(Executor):由轻量LLM(如o4-mini)驱动,负责执行子任务。它读取子任务,使用工具记忆(记录工具使用历史),调用相应工具(如搜索、代码执行),并将结果写回。
三类记忆模块分工
-
案例记忆(Case Memory):存储宏观规划经验(任务-计划-奖励)。
-
子任务记忆(Subtask Memory):记录当前任务的子任务列表及其状态。
-
工具记忆(Tool Memory):记录每个子任务下的工具调用和返回结果。
这种设计确保了任务上下文的持续传递和精细化管理。
强大的工具集成
为了应对深度研究的复杂需求,AgentFly通过Model Context Protocol (MCP) 集成了丰富的外部工具:
-
信息获取:Meta搜索引擎(SearxNG) + 精准爬虫(Crawl4AI)
-
多模态处理:支持图片、音频、视频、PDF、PPT、表格等数十种格式的解析与理解
-
推理与分析:Python代码执行沙盒、数学计算工具
这使得AgentFly能真正像人类研究员一样,在互联网上搜索信息,阅读各种格式的文档,进行数据分析,并最终给出答案。
记忆读写机制对比
|
机制 |
写入(Write) |
读取(Read) |
特点 |
|---|---|---|---|
| 非参数化 |
直接追加案例 |
TopK相似度检索 |
简单、快速、可解释 |
| 参数化 |
追加案例 + 更新Q网络 |
按Q值TopK检索 |
自适应、可学习、更精准 |
在深度研究场景中,任务通常是单步规划(即规划器只规划一步,执行器执行多个工具调用),因此作者将Q学习目标简化为监督学习,避免了时序差分学习的不稳定性,并用交叉熵损失替代MSE,更适合二值奖励信号。
实验与性能
论文在4个具有挑战性的基准上进行了全面评估,充分验证了AgentFly的有效性。
数据集
-
GAIA:复杂工具使用与多步规划,分3个难度等级。
-
DeepResearcher:7个开源QA数据集合集,测试实时网络研究与多跳推理。
-
SimpleQA:事实性单跳问答,检验幻觉抑制能力。
-
HLE (Humanity's Last Exam):涵盖多学科的长尾知识问答,测试极限推理能力。
主要结果
-
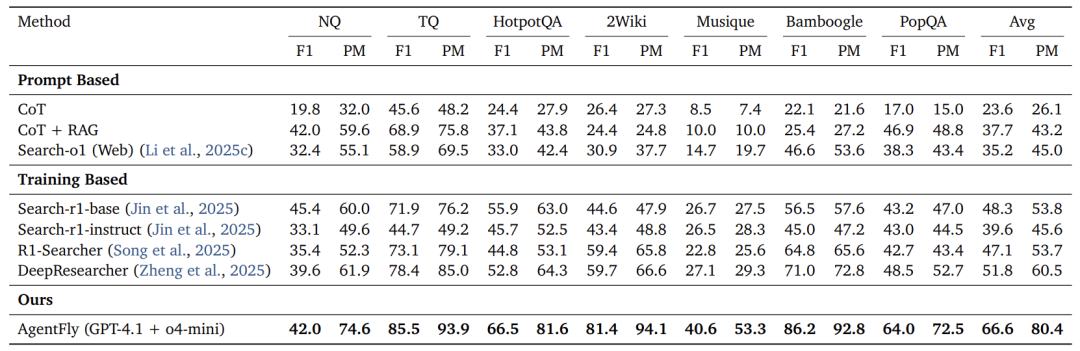
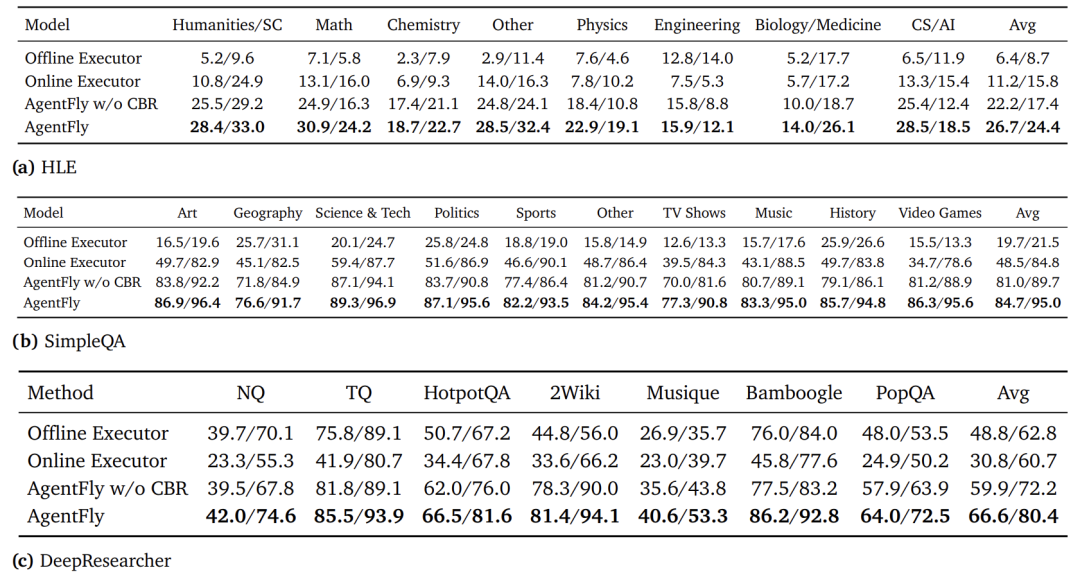
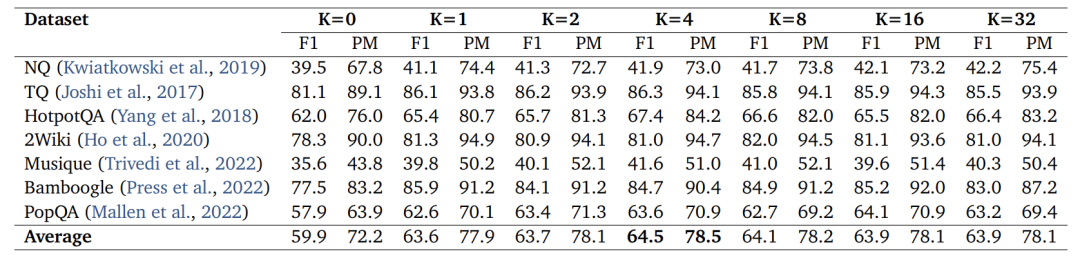
DeepResearcher:AgentFly取得了66.6% F1和80.4% PM的平均分数,显著超越所有Prompt-Based和Training-Based基线模型,证明了其在线研究能力的强大。
-
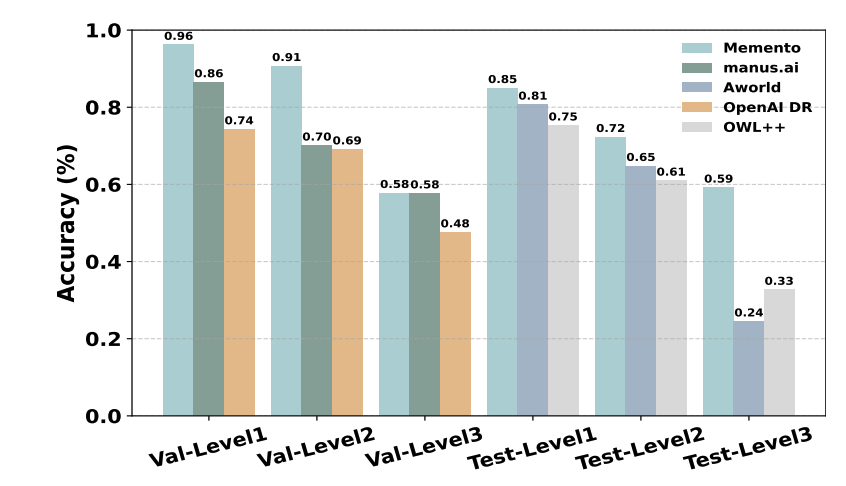
GAIA:在验证集上达到87.88% Pass@3,排名第一;在测试集上达到**79.40%**,名列前茅,超越了Manus、AWorld、OWL等知名开源框架。
-
SimpleQA:达到95.0%的准确率,创下新SOTA,表明其出色的事实准确性和抗幻觉能力。
-
HLE:达到24.4% PM,仅次于GPT-5,在专家级长尾知识问题上展现了惊人潜力。
消融实验
消融实验清晰地展示了各个组件的贡献:
-
离线执行器 → 在线执行器:接入实时工具带来巨大提升(如SimpleQA: +28.8 F1),但有时因数据污染会下降(DeepResearcher: -18.0 F1),说明模型内部知识同样重要。
-
在线执行器 → AgentFly (w/o CBR):增加规划器带来全面、显著的提升(所有任务+10~30点),证明规划与工具编排至关重要。
-
AgentFly (w/o CBR) → 完整AgentFly:引入CBR记忆机制带来一致的额外提升(+4~8点),证明了案例推理的独立价值。
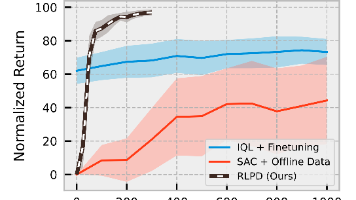
持续学习与泛化能力
-
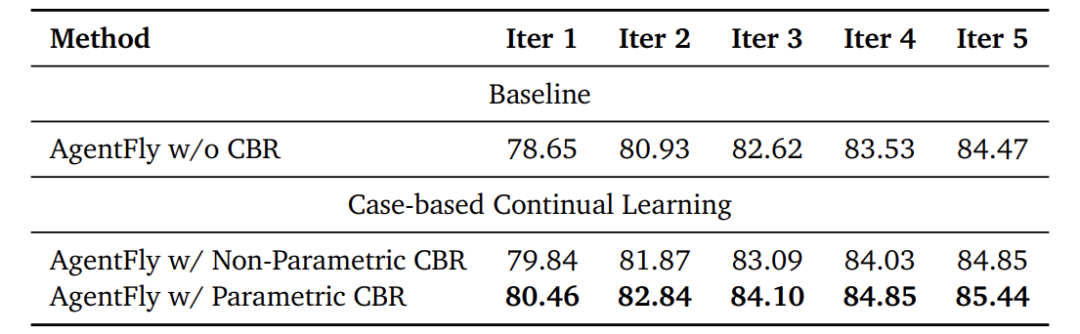
持续学习:随着迭代次数增加(案例库变大),性能持续提升,参数化CBR增益优于非参数化。
-
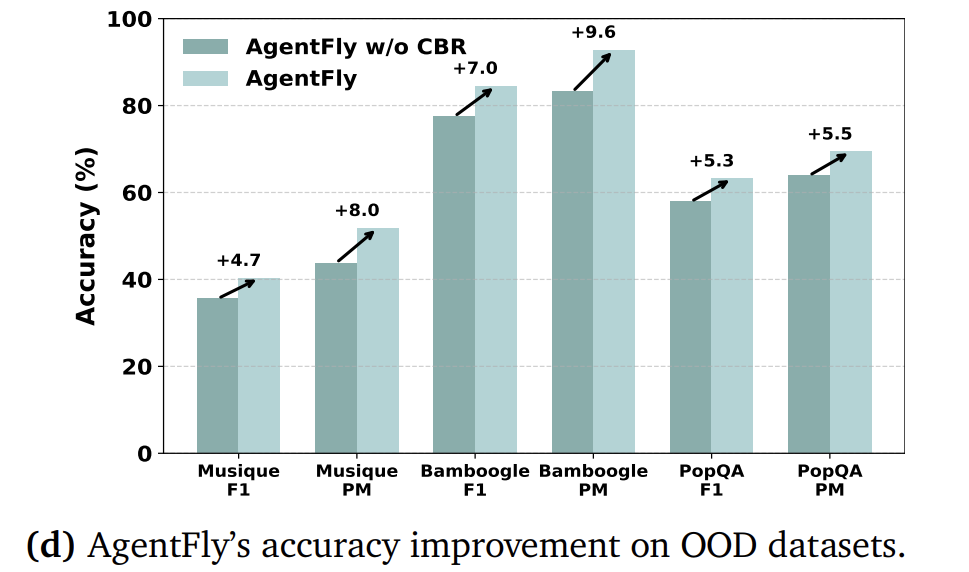
OOD泛化:在训练时未见的任务上(MusiQue, Bamboogle, PopQA),性能仍有4.7% ~ 9.6% 的绝对提升,展现了出色的泛化能力。
超参数分析
检索案例数 并非越多越好。实验表明, 时效果最佳,超过后性能持平或下降。这说明少量高质量案例比大量噪声案例更有效,与少样本学习中的“越多越好”结论不同,凸显了记忆 curation(策展)的重要性。
讨论与分析
效率与成本分析
-
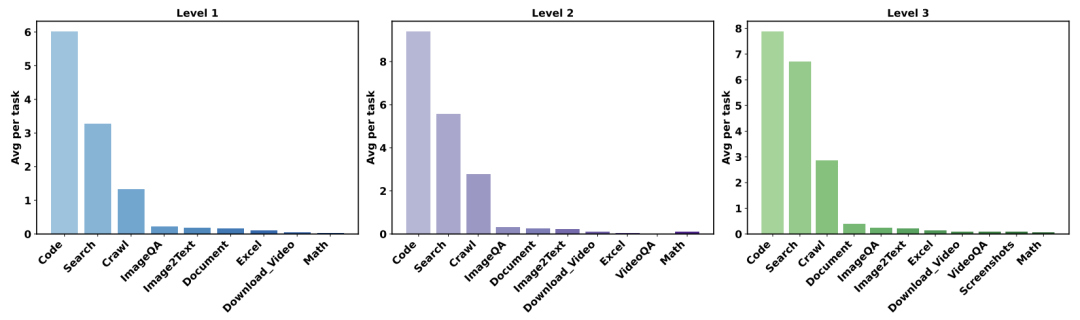
工具使用统计:随着任务难度增加,代码、搜索、爬虫工具的使用占比显著上升,说明复杂任务更依赖外部信息获取和处理。
-
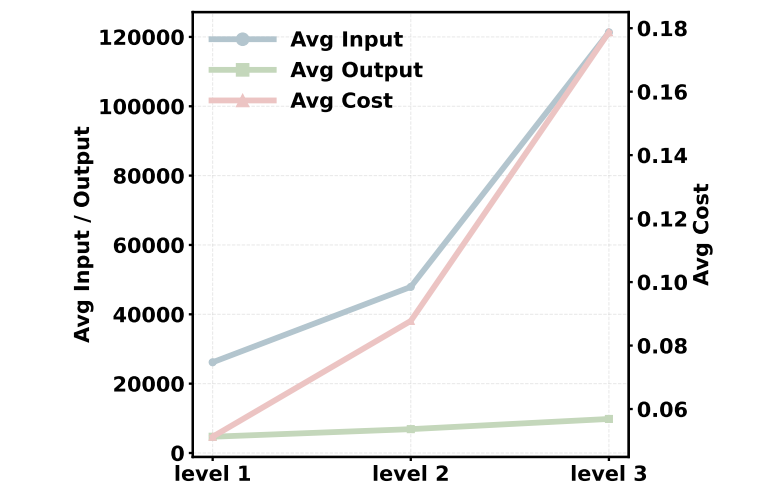
Token消耗:Level 3任务的输入Token(~121k)远高于输出Token(~9.8k),说明计算开销主要来自整合和分析多步工具的输出,而非生成最终答案。这为优化系统性能指明了方向。
规划器模式:“快思考”胜于“慢思考”
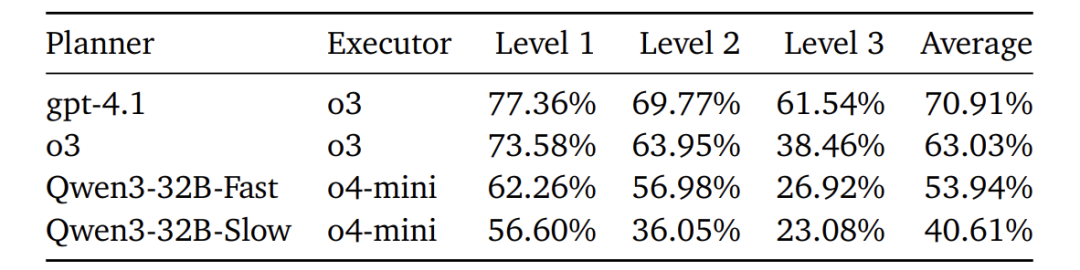
一个有趣的发现是:使用快速、非慎思的规划器(GPT-4.1)配以强大的执行器(o3),其效果(70.9%)远好于使用慢速、慎思的规划器(o3本身,63.03%)。分析表明,慢速规划器容易产生冗长、模糊的计划,甚至跳过规划直接回答问题,导致执行器困惑。而快速规划器能生成简洁、结构化的计划,更有效地指导执行器。
这揭示了在模块化系统中,角色清晰分工比每个组件都“大力出奇迹”更重要。
结论
AgentFly提出了一种革命性的LLM智能体持续学习范式。其核心在于将智能体形式化为一个记忆增强的MDP,通过案例推理(CBR) 机制,利用外部记忆库存储和复用历史经验,从而实现在线、高效的适应性学习,而无需微调LLM参数。
这项工作的巨大价值在于:
-
理论创新:将CBR与最大熵RL相结合,为智能体学习提供了新的形式化框架。
-
工程实用:提出的 planner-executor 架构与MCP工具集成,是一个强大、可扩展的深度研究智能体系统。
-
性能卓越:在多个权威基准上达到顶尖水平,充分验证了方法的有效性。
-
低成本高效益:开辟了一条不依赖昂贵微调、更接近人类学习方式的智能体发展路径。
未来,AgentFly的研究方向可能包括:更高效的记忆压缩与检索机制、遗忘策略以应对记忆爆炸、以及在更开放的多智能体环境中的协作与应用。这项工作无疑为迈向通用人工智能(AGI)的关键一步——持续终身学习——提供了坚实而高效的实现基础。
更多推荐

 16
16 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)